
Following on from the Hex Bug Spiders that we were running at Leeds City Museum, I have modified our third spider to use an XBee module for wireless control via a laptop using the 802.15.4 protocol for mesh networks. This gives me a two way channel to the spider, so we can now add sensors to it, or even a camera module.
The following clips show the spider walking (turn the sound on to really appreciate these):
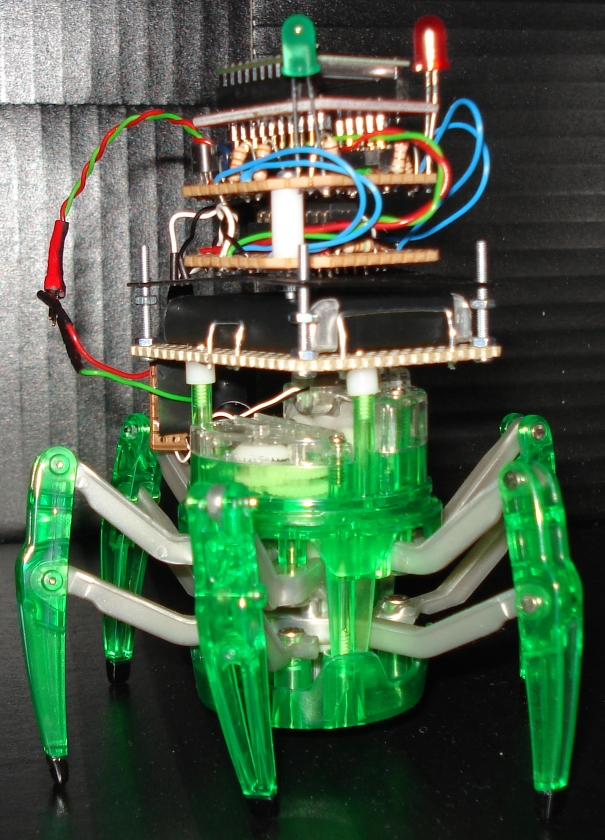
Construction details will follow in a later post, but the way this has been constructed is to take a regular Hex Bug spider and remove the carapace containing the battery cover and battery box. The three securing screws are then used to mount some prototyping board onto the body of the hex bug. Two of these white plastic bits can be seen in the picture attaching the board to the green plastic case. The first board contains a Lithium Ion camera battery (3.7v 950mAH). On top of that is a thin black plastic rectangle secured using four 2mm bolts at the corners of the battery board. Onto this is mounted two further prototype boards containing the H-Bridge driver (lower) and XBee board (upper). The upper board has a further daughter board attached to take the XBee module which sits at the very top along with the red and green LEDs. The blinking red LED shows that the network is connected while the green LED indicates received packets. The main reason for having the XBee plugged in to this adapter is to convert the 2mm spacing pins of the XBee to the 0.1 inch holes of the prototype board. The XBee adapter is actually plugged in to a chip holder that is mounted on the top board. Ideally I would have re-used the motor driver electronics of the existing Hex Bug controller, but it turned out to be too fiddly to modify, so it was easier just to construct new circuitry. This is only a prototype, but using a double-sided PCB it would be quite easy to mount everything onto a single board that would sit neatly above the battery.
In terms of software, the controller is built using Java and the XBee API that can be downloaded from Google Code: http://code.google.com/p/xbee-api/
The coordinator XBee connects to the laptop via a USB cable and is plugged in to an XBee serial adapter. This runs in API mode (escaped) while the router XBee on the spider is in AT mode. Both use the Series 2 firmware with the coordinator sending commands to the spider using Remote AT command packets (which are only available in API mode).
Now that this is running, we have the potential to run more than two spiders at once so we can build a more complex agent simulation. With the code all using Java, there is the potential to link this to NetLogo, but the missing link is the vision software which I’m still working on.